先日の続きです。
今日は Bluetooth でパドル(モールス符号を送出する時に使う道具)を操作する、途中経過です。

ESP32なマイコン、ATOM Matrix を2個使って、サーバとクライアントを構成します。
クライアント側の縦ぶれ電鍵の接点情報をサーバへ送るだけの単純な仕組みです。

この Paddle + CW Keyer の組み合わせも、パターン1と同じ。
ただ、オン/オフの接点情報だけ送ればいいだけ。

このパターン3は、無線機内蔵のキーヤーを使って遠隔操作することなんだけど。
まぁ、今どきの無線機には最初からキーヤー機能は付いてるので、このパターン3がイチバン重要があるかな。
このパターンは、短点と長点の2つの接点情報を扱う必要があるので、ワン接点方式のパターン1,2とボタン押下で切り替えられるようにしようかと思います。
ちょうど ATOM には最初からボタンも付いてるので、このボタンを使って、バグモードとキーヤーモードを切り替えたいと思います。
・・・で、以下、今日までの経過です。(パターン1,2のみ)
今回の試験では、ATOM Matrix を2個使ってます。
小さいね。10円玉ほどの大きさです。

それでは、サーバ側から実験です。

スケッチ&サーバ側の動作確認には、iOS の BLE Scanner というアプリを使いました。
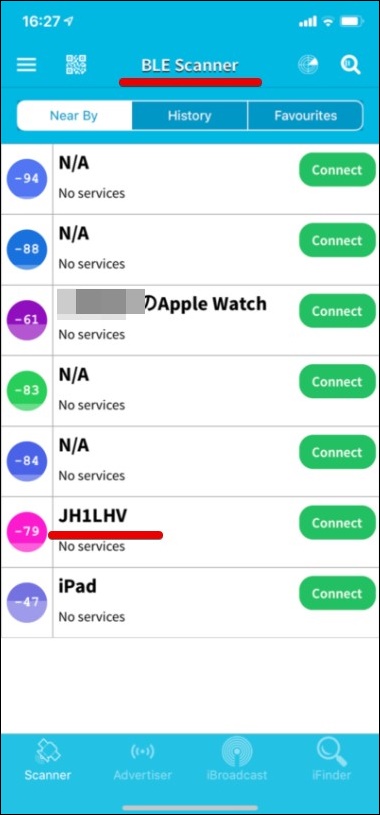
BLE Scanner のスキャンで、サーバ名として設定した ”JH1LHV” が見えたので、まずは OK です。
Connect すると ATOM 側の上段 LED が緑点灯するように作ってるので、ここも OK です。

サーバ側の ATOM は、文字列 "11111" を受信すると赤点灯するよう作ってるので、これを確認するため、BLE Scanner の書き込み(送信)機能を使って "11111" をサーバ側へ送信です。

ATOM の LED が赤点灯することが確認できたので、ここも OK です。
サーバ側の機能は、とりあえず確認できたので、続いてクライアント側の実装を行います。
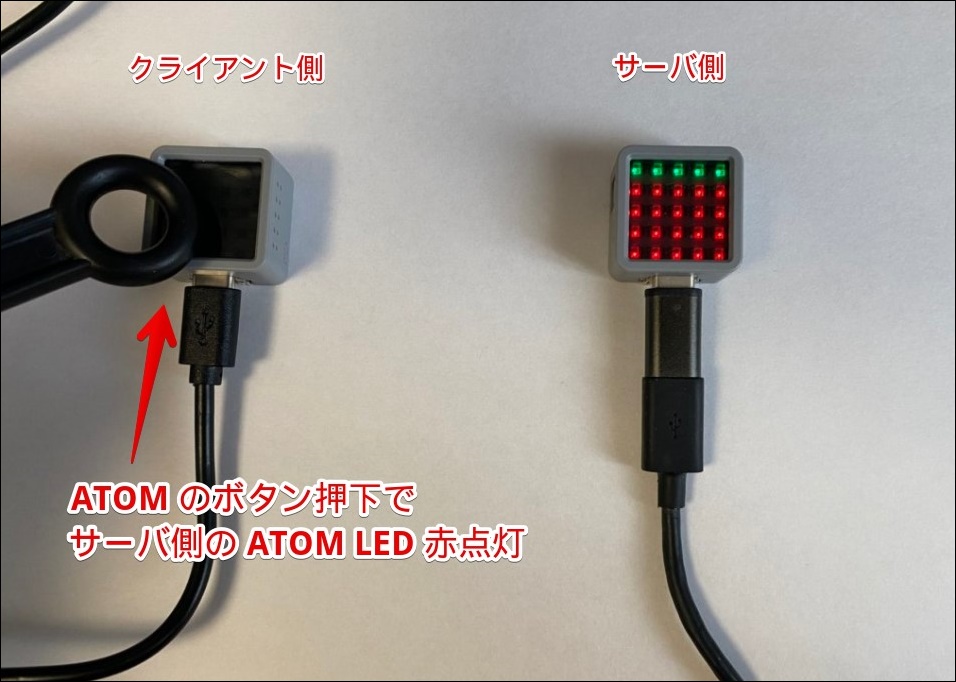
ATOMのボタン(LED 側がボタンになってる)の押下で、サーバ側の ATOM の LED を制御するだけという簡単な試験ですが、こちらも動作 OKです。
ここまでできたら、あとは実際に Keyer の接点情報をサーバへ送るだけです。
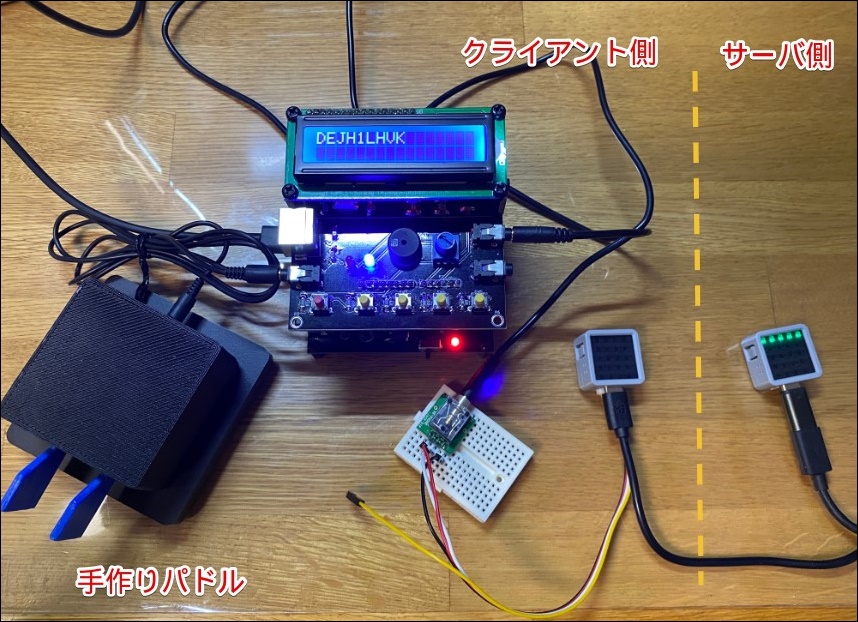
こんな感じの構成で試験を行いました。
ここで話はそれますが、ちなみに写真のパドルは手作りです。
詳細について、別記事をご覧ください。
この手作りパドル、安上がりな割にはなかなかの使い勝手なんですよ。
ポイントは、台座に鉄板を使ったことですかね。
どんなに激しくパドルを叩いたって・・・ホント、びくともしない重量感です。
ATOM GPIO
キーイングの接点情報の入出力は、ATOM の GPIO G26、G32 の Grove 端子に出てるやつを使いました。
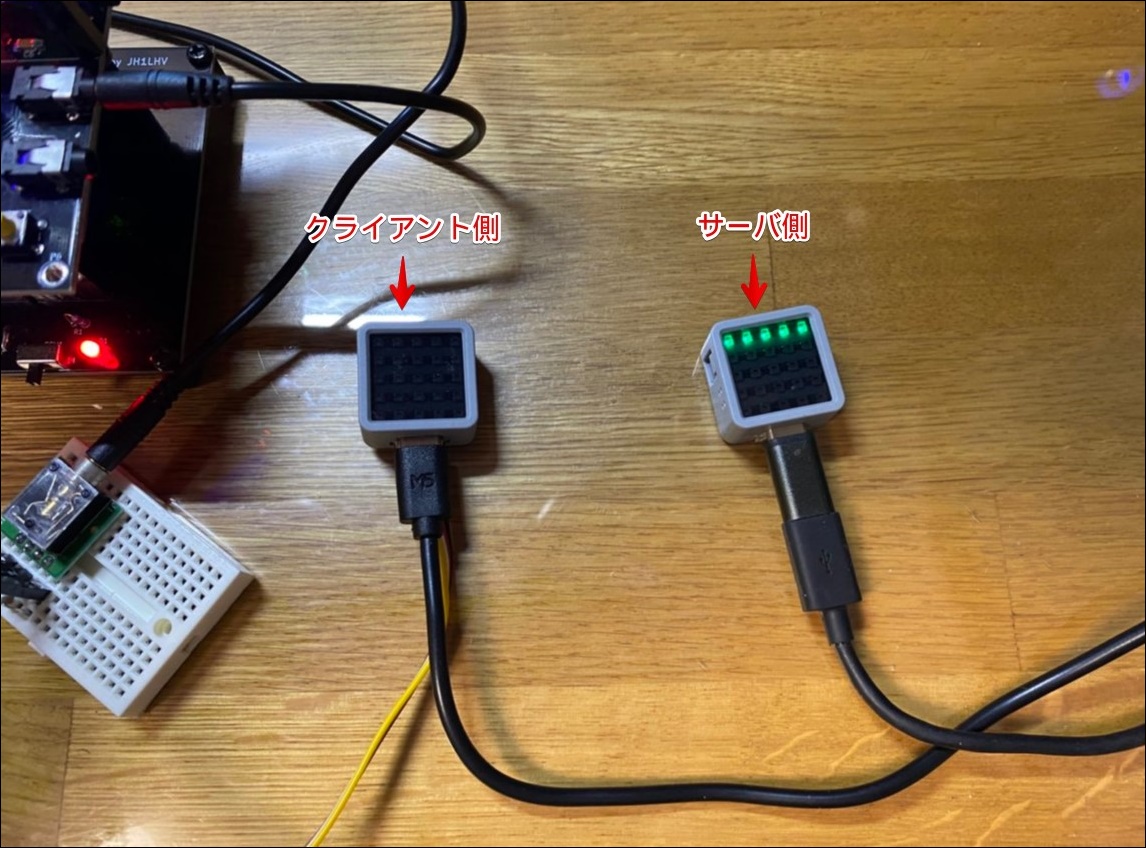
クライアントの接続でサーバ側の、緑 LED 点灯。
(あっ、クライアント側の接続成功の LED 表示・・・こっちも同じようにやった方がイイですね。)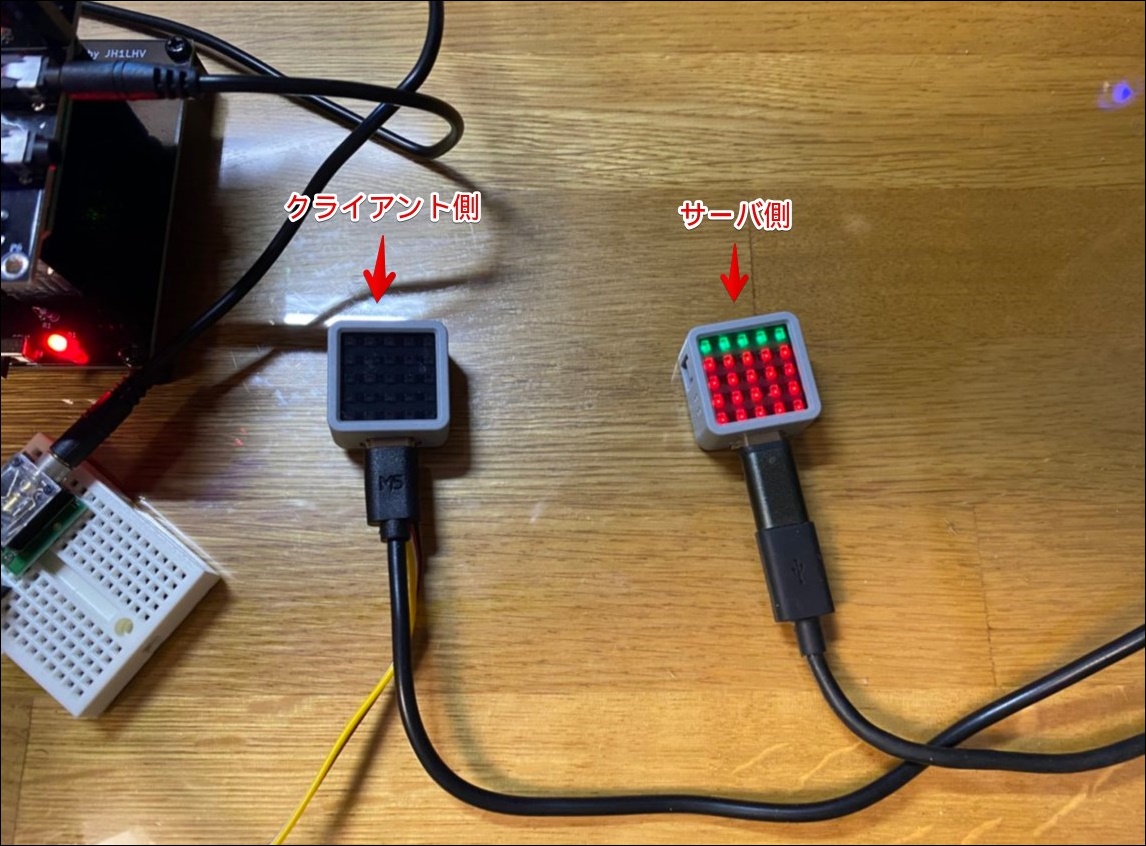
Arduino CW Keyer の TX1 端子とクライアント側 ATOM の GPIO を接続します。
パドルの操作に合わせて、サーバ側の ATOM の LED が赤点灯することを確認しました。
■ ■
次回はサーバ側の ATOM にトランジスタスイッチを付けて、実際に無線機でキーイングできるか試してみようかと思います。
うまく動作したら、あとは小さな Bluetooth アダプタが作れそうなんで・・・とっても楽しみです。
最初、ESP32 マイコン使って安くできないかと考えたんですが、ESP32 マイコン自体 @5、600円 はするし、これに基板とか SW とか LED なんかも入れたりしたら、結局 ATOM 買うくらいかかっちゃう。
ATOM Lite なら @1,000円 程度で購入できるんで。
組み立ての手間やコスパなんかを考えると、やっぱこの ATOM は最強ですね。
■ ■

こういう遠隔ソフトを PC で起動すれば、Bluetooth の電波が届く範囲の場所から CW の運用ができちゃいます。

いつも決まった周波数で運用するなら。
Bluetooth トランスミッターと Bluetooth スピーカを使えば、こんなこともできるんじゃない。
で、この ATOM なんだけど。
Wi-Fi も最初から付いてるので、ルータ越えができるように通信環境を設定すれば、意外と簡単に、もう数百キロ離れたところからでも遠隔 CW ができるかも。
単身赴任してる数年前。
もう、いろんなこと試しましたけど、流石時代は進歩してます。
この ATOM を使えば、意外と簡単に CW の遠隔操作、できるんじゃないでしょうか。
この辺りのことも、その内やってみますかね。
ということで、今日はここまでで終了です。